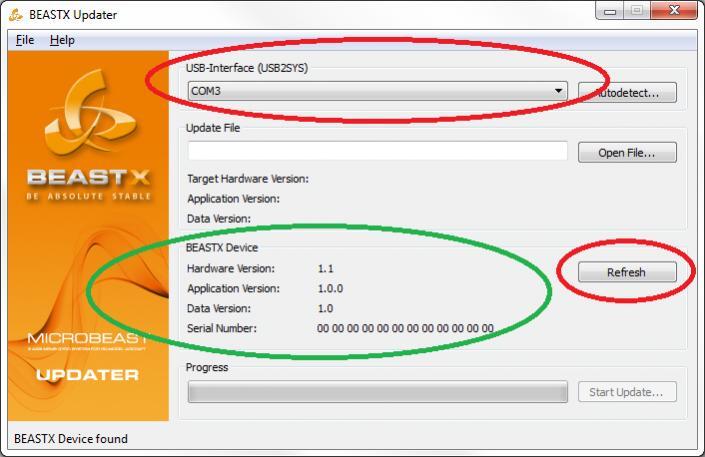
*아래 메뉴에 종종 등장하는 PC설정용 소프트웨어는 번역문을 쓰는 현 시점(2010.12.10)에는 아직 릴리즈 되지 않았습니다. 비스트엑스에서는 12월 24일 릴리즈 예정이라고 하니 참고하시기 바랍니다.
<다이얼 설명>
1. cyclic gain(싸이클릭 게인)
다이얼을 시계방향으로 돌리면+, 반대는- 입니다.
출고상태는 중간값(9시 방향)이며, 첫비행은 이 상태에서 시작할수 있습니다.
단, 450급 이하의 소형기는 약간 줄여서 첫비행에 들어갑니다.
일반적으로, 게인값이 높을수록 싸이클릭 스톱이 정확하고,
호버링 안정감이 높아지는 경향이 있습니다.
게인값이 과도하면, 조종감각이 물렁해지고, 특히 엘리베이터 동작에서 흔들림이 발생하는 경향이 있습니다.
게인값이 과소하면, 싸이클릭 동작후 멈춤이 둔해지고, 고속전진시 불안정해집니다.
2. Direct cyclic feed forward(다이렉트 싸이클릭 피드포워드)
다이얼을 시계방향으로 돌리면+, 반대는- 입니다.
다이얼값을 높이면 송신기의 키 입력이 서보로 직접 전달되는 비율이 높아집니다.
적절하게 세팅되면, MB는 최소한의 효율적인 수정동작만 행하게 되어 제어루프의 부담을 줄입니다.
게인값이 과도하면, 스틱입력이 과도하게 전달되어 , MB는 이를 보상하기 위해 역타를 급하게 치게됩니다.
날카로운 키감을 얻을수 있지만 싸이클릭 스톱시에 반동이나,
고속전진시의 부정확한 반응등의 부작용이 나타납니다.
게인값이 과소하면, 기체는 좀더 말랑하고 느린 반응을 보입니다.
최적의 게인값은 블레이드, 서보, 헤드스피드(로터RPM), 크기와 중량등의 변수에 따라 달라집니다.
출고상태는 중간값(9시 방향)이며, 첫비행은 이 상태에서 시작할수 있습니다.
* 다이렉트 싸이클릭 피드 포워드는 기체의 싸이클릭 속도(플립,롤 레잇)를 바꿔주지는 않습니다.
만약 기체의 플립, 롤레잇이 낮다면, 셋업메뉴의 L항목에서 충분한 타각이 확보되었는지 확인하고,
패러미터메뉴의 B항목을 수정하거나,
송신기의 EPA(ATV)값 또는 듀얼레이트 값을 높여야 합니다.
3. Tail dynamic(테일 다이나믹)
다이얼을 시계방향으로 돌리면+, 반대는- 입니다.
출고상태는 중간값(9시 방향)이며, 첫비행은 이 상태에서 시작할수 있습니다.
뒤이어 나오는 테일자이로 게인에 대한 내용을 먼저 확인하고 다이얼의 조정을 해야 합니다.
테일 다이나믹값을 높이면 러더입력에 대한 기체의 반응이 좀더 날카로워집니다(민감하게 반응하고 강하게 멈춤).
게인이 과도하면, 피루엣후 급하게 멈출때 테일이 바운싱을 하게되고,
빠른 러더키 방향전환에 물렁한 반응을 보입니다.
게인이 과소하면, 키반응이 둔해지고 정지반응은 심하게 완만합니다.
적정값으로 세팅되면, 피루엣후 정지시 붕붕거림없이 정확하게 멈춥니다.
<테일자이로 게인>
기존의 테일자이로와 마찬가지로, 테일게인은 송신기의 보조채널에서 조정합니다.
보조채널의 중립을 기준으로 한쪽은 노말, 다른 한쪽은 헤딩락모드가 됩니다.
MB의 초기화가 끝난후 비행준비가 완료되면,
상태LED의 색상으로 노말(보라), 헤딩락(파랑)을 구분할 수 있습니다.
초기화후, 혹은 게인값의 변경후 약 10초간 메뉴LED가 현재의 게인값을 표시합니다.
즉, 메뉴LED의 A가 켜져있으면 0%, N이 켜져있으면 100%를 의미합니다.
송신기 기종이나 메이커에 따라, 송신기상의 표시값이 MB의 표시값과 차이가 날 수 있습니다.
하지만 기준은 어디까지나 MB의 표시값이 됩니다.
*역자 주 : 보조채널(자이로 감도채널)의 EPA값이나 서브트림값을 조정하여 두 값을 일치시킬 수 있습니다.
비행테스트는 헤딩락 모드에서 게인값이 F나 G사이로 시작합니다.
낮은게인값(펌핑시 테일유지력이 약하고 피루엣 급정지시 오버슛하며 멈춤)에서 테스트를 시작하여,
점점 게인을 높여가며 (펌핑시 테일유지력이 강하고 피루엣 급정지시 정확하게 멈춤) 반응을 확인합니다.
게인이 과도하면, 피루엣 급정지시 바운싱이 발행하며, 빠른전진-후진 비행시 테일이 흔들립니다.
*감도채널을 할당하지 않고는 작동이 불가능합니다.
<패러미터 메뉴>
MB의 초기화가 완료되면(네온싸인 쇼가 끝나고 상태LED가 청색 또는 보라),
버튼을 잠깐 누르고 있다보면 A메뉴 LED가 깜박거립니다.
이때 버튼에서 잽싸게 손을 떼면 패러미터 메뉴에 진입(A메뉴 LED가 깜박이는 상태)한 것입니다.
이상태에서 버튼을 한번 누를때마나 메뉴의 다음항목으로 넘어가고,
마지막 메뉴에서 버튼을 한번 더 누르면 플라이트 모드(상태LED가 청색 또는 보라)로 빠져나갑니다.
셋업메뉴와 마찬가지로, 변경이 필요없는 항목을 그냥 넘어가고 싶으면
송신기에 손을 대지말고 버튼을 눌러주면 됩니다.
*셋업메뉴나 패러미터메뉴 상태에서는 절때 비행을 시도해서는 안됩니다.
메뉴상태에서는 MB제어시스템은 동작하지 않으며, 대부분 스틱의 입력도 먹지않습니다.
A;Swashplate cyclic center adjustment(싸이클릭 중심-트림-조정)
여기서는 스와시플레이트의 중심을 재조정 할 수 있습니다.
송신기의 트림을 조정하는것과 비슷한 개념이며,
피루엣에서 기울어짐이 생기거나, 급피치조작시 기체가 기울어지는경우에 조정이 가능합니다.
*송신기의 트림은 절대 사용하면 안됩니다.
MB는 트림입력을 조종입력으로 인식합니다.
셋업메뉴의 G항목과 달리, 단지 에일러론과 엘리베이터 키의 입력만으로 서보가 연동되며 스와시의 중립위치를 조정합니다. 하지만 컬렉티브 피치의 중립은 여기서 조정할 수 없습니다.
싸이클릭 스틱(에일러론이나 엘리베이터)를 스와시 플레이트가 올바른 방향으로 향할때까지 밉니다.
(많이 밀면 빨리 기울고, 적게밀면 천천히 기웁니다)
테일스틱을 한쪽으로 쳐주면, 지금까지의 입력이 지워지고 다시 원위치로 돌아갑니다.
*버튼을 눌러 저장되면, 셋업메뉴 G에서 설정된 사이클릭 서보의 중립위치도 같이 바뀝니다.
원래위치는 알수없게 되므로 신중하게 설정하세요.
*역자 주:FBL기체는 특히 무게중심이 중요합니다.
스와시 센터를 다시 조정하기 전에 다시한번 무게중심을 체크 할 필요가 있습니다.
당연한 얘기지만, 무게중심은 배터리와 캐노피등이 완비된 상태가 기준이 되어야 합니다.
만약 무게중심이 안맞은 상태에서 스와시 플레이트의 센터조정으로 억지로 자세를 바로잡는다면,
배면때는 반대상황이 되며 중립특성이 나빠지게 됩니다.
셋업메뉴 G에서 스와시플레이트의 수평OK, 무게중심 OK상태라면,
본 항목의 설정은 손대지 않는것(필요가 없음)이 원칙이 아닌가 생각됩니다.
완료되면 버튼을 눌러 설정을 저장하고 다음메뉴로 이동..
B;Control behavior(비행특성 설정)
여기서는 사용자의 취향에 맞는 비행특성을 설정합니다.
각 방향의 회전(롤,플립,피루엣)속도나, 각 스틱의 중립근방에서의 MB의 반응의 민감성을 좌우합니다.
출고세팅은 "스포츠"-상태 LED 깜박이는 빨강-이며, 가장 무난한 설정입니다.
비교적 경험이 적은 파일럿이라면, 첫비행전 "노말"-상태LED 보라-로 설정할것을 추천합니다.
"노말"세팅에서는 각 방향의 회전속도가 상당히 느리고, 각 스틱의 중립근방에서의 기체반응이 메우 얌전합니다.
(역자 주:송신기의 EPA를 줄이고/EXP를 많이 준 느낌과 비슷하다 하겠습니다.)
테일스틱을 치면 상태LED가 원하는 설정으로 바뀝니다.
기본설정이 전부 마음에 들지 않는다면, 컨트롤 특성을 전부 "송신기 설정"(상태LED 파랑)으로 결정할 수 있습니다.
이 옵션에서는, MB자체의 EXP 설정대신 송신기의 EXP설정만이 유효합니다.
각 방향(롤,플립,피루엣)의 최고 회전속도는 송신기의 EPA(ATV)를 증감하여 바꿀 수 있습니다.
테일제어의 경우, 헤딩락모드에서는, MB의 피루엣 회전속도제어를 해제하여,
테일채널의 EPA를 키움으로서 극도로 빠른 피루엣 회전도 가능합니다.
테일스틱을 풀 타각으로 치면 상태LED가 깜박이며 속도제어의 한계에 도달했음을 표시합니다.
여기서 EPA(ATV)를 키우면, 상태LED는 계속 켜진상태를 유지하며,
자이로의 속도제어가 없는 고속피루엣-기체의 테일조정기구가 허용하는 한도까지-이 가능합니다.
*이 기능은, 송신기 스위치에 D/R을 할당하여, 특별히 빠른 피루엣 속도가 필요한 하드 3D에서 선택적으로 사용할 수 있습니다.
*자이로의 제어가 없는 고삐풀린 망아지같은 피루엣 상태이므로, 사용상 주의가 필요합니다.
만약 원치않는 일반적인 비행에서 상태LED가 계속 켜져있다면, 러더채널의 EPA(ATV)를 줄여야 합니다.
"사용자 설정"(상태LED 꺼짐)옵션은 PC프로그램으로 임의설정을 할 수 있습니다.
완료되면 버튼을 눌러 설정을 저장하고 다음메뉴로 이동..
C:Swashplate-pitching up compensation(피칭업 보상)
고속 전진비행에서 컬렉티브피치 조작을 했을때, 기체는 수평을 유지하면서 상승 또는 하강을 해야 합니다.
만약 돌핀킥을 하듯이 기수를 들거나 숙인다면, 본 항목의 설정값을 키워서 해결할 수 있습니다.
테일스틱을 치면 상태LED가 변하며 설정이 바뀝니다.
하지만 과도하면 조종감이 둔해지므로, 기수의 피칭을 없앨 수 있는 최소치를 찾아야 합니다.
만약 최대(상태LED 파랑)로 설정했는대도 증상이 사그러들지 않는다면..
1번 다이얼(스와시플레이트 게인)을 반시계방향(감소)으로 약간 돌려봅니다.
그래도 안돼면, 속도와 토크가 짱짱한 서보로 바꾸거나, FBL전용 메인블레이드를 써 봅니다.
"사용자 설정"(상태LED 꺼짐)옵션은 PC프로그램으로 임의설정을 할 수 있습니다.
원하는 설정상태가 되면 버튼을 눌러 설정을 저장하고 다음메뉴로 이동..
D;Tail HeadingLock gain(테일 헤딩락 감도조정)
테일의 헤딩락 게인-피루엣중이나 정지시 러더축의 안정화 정도-을 조정하는 메뉴입니다.
일단 "낮음-깜박이는 빨강", 또는 "매우낮음-보라"상태로 설정하고,
호버링과 펌핑을 해가며 송신기의 자이로 감도의 최대값을 찾습니다.
그 다음 플라잉을 하면서 헤딩락 게인을 한단계씩 높여봅니다.
설정값이 과소하면, 고속 전진시나 측풍시에 테일이 불안정합니다.
설정값이 과대하면, 피루엣 스톱 동작에서 느릿한 바운싱이 생기고, 반대타를 칠때 애매한 반응을 보입니다.
또한, 호버링이나 주회비행시 완만한 테일의 흔들림이 있을 수도 있습니다.
테일스틱을 치면 상태LED가 변하며 설정이 바뀝니다.
원하는 설정상태가 되면 버튼을 눌러 설정을 저장하고 다음메뉴로 이동..
* 피루엣 스톱의 반응이 좌-우에서 차이가 있으면,
자이로를 노말상태로 두고 기계적인 중립을 잡아줄 필요가 있습니다.
노말에서 한쪽으로 흐른다면, 링크로드 길이나 테일서보의 위치조정으로 중립을 유지하도록 맞춥니다.
링키지를 조정한 다음에는 셋업메뉴의 "E"항목의 테일리미트 설정을 꼭 다시해야 합니다.
* 패러미터 메뉴의 "B"항목에서 비행특성설정을 "송신기"옵션으로 선택했다면,
우발적으로 자이로의 제어가 없는 고속피루엣상태에 들어가지 않토록 주의해야 합니다.
"사용자 설정"(상태LED 꺼짐)옵션은 PC프로그램으로 임의설정을 할 수 있습니다.
원하는 설정상태가 되면 버튼을 눌러 설정을 저장하고 다음메뉴로 이동..
E;Stick deadband(스틱 데드밴드 설정)
에일러론,엘리베이터,러더스틱의 데드밴드-스틱의 중립위치에서 작은 입력값은 무시하는 범위-를 설정하는 메뉴입니다.
일부 송신기모델은, 스틱을 놓았을때 완전한 중립위치로 복귀하지 않는 경우가 있다고 합니다.
이런경우가 생기면, 스틱이 중간에 있는것처럼 보여도 MB는 마치 송신기의 키를 미세하게 치고있는 상태로 인식하는 결과가 됩니다.
데드밴드 설정이 과소하면, MB는 키의 중립위치를 인식하기가 어렵게 되어,
이륙시 기울거나, 비행중 기체의 조종이 어렵게 됩니다.
데드밴드 설정이 과대하면, 스틱 중간부근의 무반응 영역이 너무커져서, 호버링시의 정밀조정이 어렵게 됩니다.
테일스틱을 치면 상태LED가 변하며 설정이 바뀝니다.
원하는 설정상태가 되면 버튼을 눌러 설정을 저장하고 다음메뉴로 이동..
F;Tail-torque precompensation(레볼루션 믹싱)
컬렉티브나 싸이클릭피치를 변경하면, 기체의 반토크 부하도 변동됩니다.
MB는 이를 감지하여, 실제로 토크가 변동하여 테일이 돌아가는것을 감지하기 이전에,
테일피치의 타각변경을 선행토록 할 수 있습니다.
이는 테일 컨트롤 루프의 부담을 경감시켜 결과적으로 테일성능을 높이게 됩니다.
본 항목의 세부 설정은 PC소프트웨어를 통해서만 가능하며, 스틱을 통해서는 본 기능의 on/off만 결정합니다.
원하는 설정상태가 되면 버튼을 눌러 설정을 저장합니다.
모든 패러미터 메뉴의 설정이 끝나고, MB는 플라잉모드로 나갑니다.
<첫비행>
MB탑재후 첫비행절차 및 몇가지 팁 입니다.
송신기->수신기의 파워를 넣고, MB가 초기화절차를 끝낼때까지 기다립니다.
스와시서보가 몇번 까딱거리고, MB의 상태LED가 파랑(테일 헤딩락의 경우) 또는 보라(테일 노말의 경우)로 되면 초기화 완료입니다.
초기화가 진행되는 동안 기체를 수평으로 놔 두어야 할 필요는 없지만, 움직여서는 안됩니다. 만약 바람때문에 메인로터가 흔들린다면, 기체를 옆으로 눕혀두어도 무방합니다.
일단 3개의 조정다이얼은 출고상태(전부 중간값, 9시방향)로 되어있는지 확인합니다.
*다이얼 설명에서 언급되었지만..450급 이하의 소형기체는 1번 다이얼(싸이클릭 게인)을 디폴트보다 약간 줄이는것이
도움이 될 수 있습니다.
테일자이로 감도는 송신기값을 조정하여 메뉴LED가 F또는 G에 불이 들어오는 위치로 조정합니다.(약35~50%)
패러미터 메뉴의 B 항목은 비행스타일에 맞추어 둡니다
(역자 주 : 첫비행은 디폴트에서 시작하는것이 무난할것 같습니다)
*이륙전에 각 스틱의 방향과 스와시플레이트, 테일슬라이드의 방향,
그리고 기체를 잡고 이리저리 기울여보며 각 자이로센서의 방향이 올바른지 확인합니다.
*스틱을 쳤다 놓으면, 기울어졌던 스와시플레이트가 천천히 되돌아오는것이 일반적입니다.
*플라이바헤드와 비교하면, 조종자는 기체를 직접적으로 제어하지 않는것과 마찬가지 입니다.
마치 플라이바이 와이어 시스템처럼, 조종자는 타면을 조정하는것이 아니라 롤레이트를 조정하는 개념입니다.
테일자이로의 헤딩락 모드에서, 러더키를 쳤다 놓아도 테일서보가 원위치로 돌아오지 않거나,
키조작에 즉각적으로 반응하지 않는것과 마찬가지의 맥락으로, 스와시 서보의 컨트롤 역시 MB에서 담당하고 있습니다.
*이륙직전, 스와시플레이트는 수평, 테일슬라이더가 중립위치에 있음을 확인하세요.
테일 슬리이더는, 자이로 모드를 노말로 잠깐 스위칭했다 돌리면 중립으로 돌아갑니다.
* 이륙시에 급격한 키조작은 피해야 합니다. 기체가 전도될 위험이 있습니다.
FBL기체의 이륙시 가장 좋은 방법은, 충분한, 그리고 일정한 쓰로틀 스틱조작을 통해 신속하게 공중으로 띄우는것 입니다. FBL기체의 경험이 없다면, 이러한 조작에는 연습이 약간 필요합니다.